 |
 |
 |
 |
 |
 |
 |
 |
 |
| ツイート |
|
AF方式の違い(位相差検出式とコントラスト検出式の違い)
AF方式は、一眼レフで主流となっている「位相差検出式」と、「コントラスト検出式」と、「像面位相差式」の3種類の方式があります
今まで、このサイトでも、位相差検出式は高速です、動体に強いですということは何度か書いてきたのですが、ちゃんとまとめて書いたことがなかったので、ここでは、AF方式の特徴について書いていきたいと思っています。
| 位相差検出式(一眼レフ) | |
| メリット |
|
| デメリット |
|
| コントラスト検出式(コンパクト・ミラーレス・スマホ) | |
| メリット |
|
| デメリット |
|
| 像面位相差式(ミラーレス) | |
| メリット |
|
| デメリット |
|
位相差検出式は、AF専用のセンサーを使って、カメラとピントを合わせたいものの「距離」を認識することができます、詳しい仕組みは最後の方にまとめて、とりあえず位相差検出式は、ピントのずれた「方向」と「量」を図ることのできる方式というのが特徴です
対して、コントラスト検出式は、ピントのあった場所はコントラストが高くなるという現象を利用しています、この方式は、カメラとピントを合わせたいものの距離は認識できません、わかるのは、ピントが「合ってる」か、「あっていない」かだけです、なので細かくレンズを動かして、コントラストが高くなったかどうかをチェック、また動かしてチェックを繰り返して、一番コントラストが高くなった場所をピントが合っているとします、そのため、位相差検出式に比べると遅くなってしまうのです。
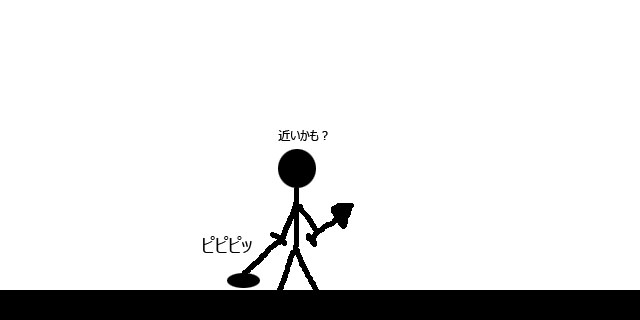
この二種類の動作の違いを、宝探し(ピント探し)にたとえると、次の図のようなことになります
位相差検出式の場合
 |
| すでに、宝のある場所までの距離がわかっているため 距離を指定して、移動できます |
 |
| さささっと・・・ |
 |
| 10m移動して、宝の位置に到着 (あとは、ほるだけ) |
コントラスト検出式で探す場合
 |
| スタート時点ではどの方向に宝があるかすら 把握できてないので、しらみつぶしに探すしかありません |
 |
| どうも、逆の方向に動いてしまった 当然方向がわからないので こういうことも起きます |
 |
| すこし宝に近づいてきた |
 |
| だいぶ近づいてきました |
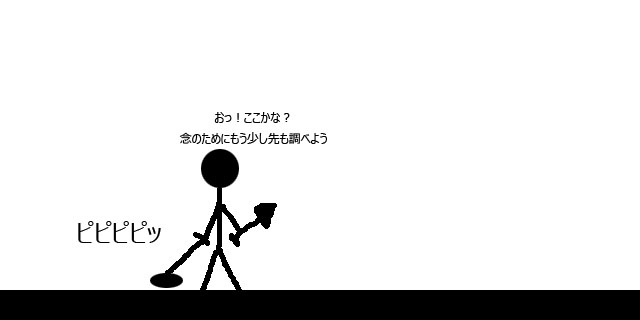 |
| この時点で、決めうちする人(機種)も あるかもしれませんが・・・ どうやら、この人は慎重なようです^^; |
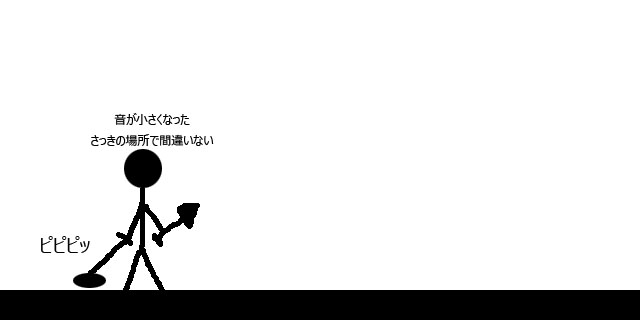 |
| 宝から離れたことを確認して さっきの場所が宝(ピント)の場所と 確信したようです |
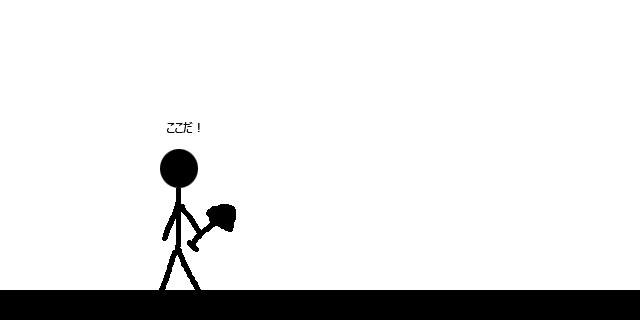 |
| 無事に宝の位置に到着 上に書いた、位相差検出式に 比べると、こんな探し方なので どうしても遅くなってしまいます |
位相差検出式が動体に強い理由も、まったく同じ理由で、とりたいものまでの距離がわかるからです、動いてるものは、常に距離が変わるのですが、変わった距離も瞬時に認識できるため移動速度と方向も計算することが可能なのです
同一の速度、同一方向(急に止まったり、逆走とかしないようなもの)であれば、動きを予測して、ピントを合わせることさえしてくれます、そのため、位相差検出式は動体にも強いといえます
上の説明を見る限り、圧倒的じゃないか、位相差検出式は!!、なぜ、コントラスト検出式が主流になっているんだと思われると思いますが、それにはいくつか理由があります
・位相差検出式には、専用のセンサーが必要だったため(やや過去形)
位相差検出式は、複雑な構造が必要で、専用のセンサーが必要でした、そのためコンパクトデジカメに搭載しようとすると、撮影レンズとは別の場所にセンサーのためのレンズが必要になってしまい、その構造では視差の影響もあり補助センサー止まりとなってしまいます
位相差検出式のみで、問題なくAFを行うには、TTL方式であることが条件でTTL方式の位相差検出式センサーを搭載するためには、一眼レフのミラー構造のような複雑な構造が必要になります、それで位相差検出式を搭載できるカメラは、一眼レフとなり、それ以外は コントラスト検出式という状態だったわけです
現時点でも、これは大きい理由の一つなのですが、実は若干事情が変化し一眼レフ以外の位相差検出式のカメラが増えてきました その理由は、後ほど
*TTLとは
スルー・ザ・レンズ(Through The Lens)の略称で、レンズを通じて入ってきた光を、カメラのボディ内にあるセンサーで測るものという意味です。露出計の話として出てくることが多い
・位相差検出式は、AFポイントが固定される
位相差検出式の場合、センサーのない場所はピントを合わせることができません、そのためAFできる場所は限られてしまいます(10箇所〜150個所前後)それに対して、コントラスト検出式には、そのような縛りはまったくなく画面上のどこでもAF可能なため、人間の顔の場所にピントをあわせる、顔認識AFなどは、位相差検出式には不可能だと思われる芸当で、そういった使い勝手の部分でコントラスト検出式が上ともいえます
・AF精度を高めやすい
コントラスト検出式は、実際に映る映像を利用してピントを合わせるため、AF精度が高いという面は大きなメリットと言えます。
コントラスト検出式と位相差検出式は、どっちが上というより一長一短のあるAF方式と考えてもよいかと思います
ミラーレスなどで採用が増えてきた像面位相差AFというものもあります、正直言えば、これは衝撃でした・・・位相差検出式には専用のセンサーが必要、これを過去のものにしてしまう可能性が高い技術だと感じたためです。
これは、イメージセンサーに位相差検出式のためのセンサーを埋め込むことで、専用のセンサーをなくして、一眼レフのような複雑な構造をとらずともTTLの位相差検出式を可能にしただけでなく、イメージセンサーに埋め込まれてるため、精度も高くしやすいというメリットがあります。
同時にコントラスト検出式も併用可能になるため、位相差センサーのない場所ではコントラスト検出式でピントが合わせるなどもでき、位相差の高速性とコントラストの使い勝手のよさや精度の高さを持ち合わせることが可能な方式といえます
デメリットとしては、位相差検出式センサーを埋め込んだ部分は画素としては働かないため、画質への影響が出る場合があるようです。ただ画質への影響をいかに小さくするか各メーカー力を入れているため、ほとんどの場合気になることはないレベルになっています。
以下は位相差検出式の動作原理と、ミラーレスで使われる像面位相差の動作原理をまとめました。像面位相差については、最後のほうに書いてあります。AFの動作については、興味のある方向けになります。
スペック表などを見ると、クロスタイプセンサーという言葉が出てきます、これはいったい?と思われる方も多いと思います。詳しい動作原理は後で書きますが、位相差検出式のAFセンサーは、大まかに分けるとセパレータレンズとラインセンサーという二つの部品で作られています。
このラインセンサーが1本だけ搭載されている場合(シングルタイプといわれる)、横向きにセンサーあれば被写体の縦の線を基準にピントを合わせます。縦向きにある場合は、被写体の横の線を基準にピントを合わせます。対して、クロスタイプは縦のラインセンサーと横のラインセンサーの2本のラインセンサーをもっているセンサーを指します。縦と横の2本のラインセンサーがあるため縦と横の両方の線を基準にピントを合わせることができるため、シングルタイプくらべ、AF精度が高く、またAFエリア内の被写体に縦線や横線のどちらかがなくてもAFが問題なくできるため対応できるシーンが多いのが特徴です。
ざっくり言えば、クロスタイプが多いセンサーほどAF対応力が高く、精度も高いと思って間違いないです。
とりあえずF8対応センサーとは、開放F値がF8というような暗いレンズであってもAF可能な高性能AFセンサーとだけ覚えていただければ十分だと思います。
その理由については、位相差検出式の動作原理とも関係があるので、かなりややこしい話になってくるのですが、下にまとめましたので興味があればどうぞ
位相差検出式の動作原理
光束を1本の線で表すなどちょっと手を抜いてしまった図ですが・・
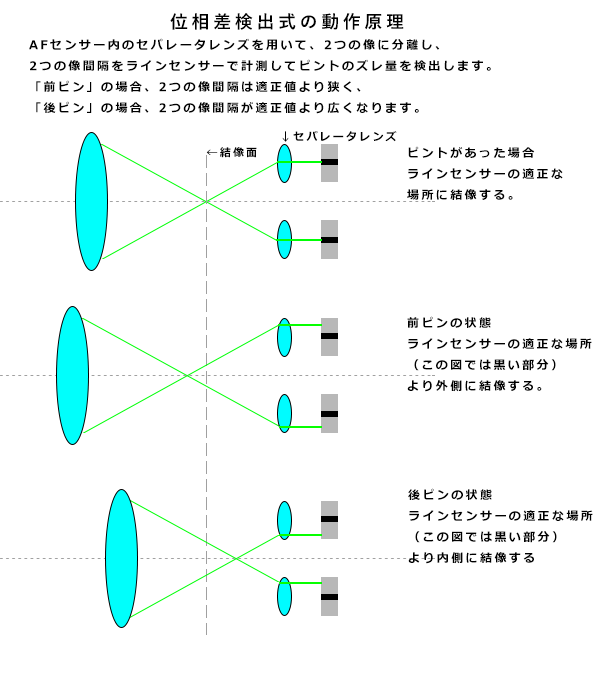
上の図のように、セパレータレンズ(2次結像レンズともよばれる)を使い、ラインセンサー上に結像させます、このときにピントがあってる場合(結像面に焦点が来てる)ときの結像位置を適正値とします、結像面より前に焦点が来てる場合は適正値より外側に結像、後ろに結像する場合は、適正値より内側に結像するという動きになります。
このため結像位置が適正値の外側か内側かで、ピントが前にずれてるのか後ろにずれてるのか「ピントのずれてる方向」がわかります。さらに、どの程度適正値からズレているのかで「ピントのずれてる量」もわかるというわけです。
ちなみに、像面位相差AFもやり方は異なりますが、基本的な原理は位相差検出式と同じです。
F8対応位相差検出式センサーとは
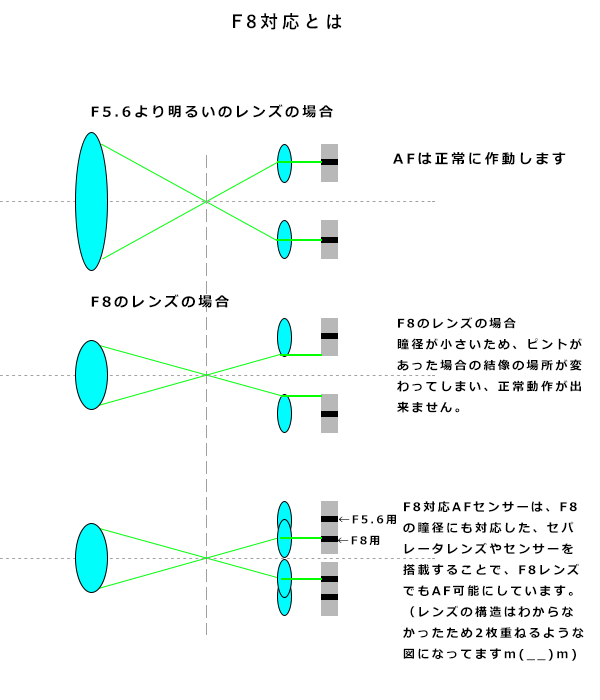
一般的に、位相差検出式のセンサーはF5.6の光束を利用します。その理由としては、一眼レフ用のレンズは開放F値がF5.6より明るいレンズがほとんどで、またF5.6より明るいF2.8などのレンズの場合、より瞳径の小さいF5.6の光束も含まれるのでF5.6用のAFセンサーがあればなんの問題もなくAF可能なためです。
しかし、希に開放F値がF5.6より暗くなるケースも存在します。例えば400mmF4.0のレンズに2倍のテレコンをつけた場合は、800mmF8に相当するレンズとなります。(F値=焦点距離÷有効口径で、テレコンをつなげてもレンズの有効口径は変わらず、焦点距離のみ2倍になるため、この例の400mmF4の有効口径は100mmなので、F=(400×2)÷100=8 よって、F8相当となります。)
このようなF8のレンズの場合、F5.6より瞳径が小さいためF5.6の光束が含まれません。そのため上の図の真ん中のように正確にAFが出来なくなります。そこで上の図の3番目のようにF5.6用のもの以外にF8の光束にも対応したセパレータレンズやラインセンサーも乗せることで、開放F値F8のレンズ対応可能にした物がF8対応センサーです
また少しわかりにくい点だと思いますが、開放F値F8のレンズでAFが出来ないのは瞳径が小さいためであって、F5.6のレンズに比べ入る光が少ないからではないため、F4.0のレンズに2段分の減光効果のあるNDフィルターでF8の光しか入らないという場合は、瞳径はF4.0なのでAF可能です。逆に言えば、F8非対応のセンサーでは、明るい環境であってもF8のレンズではAF出来ないと言うことを意味します。
ちなみに、一部のメーカーではF8対応以外にF2.8対応センサーというものも存在します。先ほどF2.8のレンズは問題なくAF可能と書きましたが、実はF2.8の光束を使うと、結像の位置の動きが大きくなり距離を測りやすくなるため、原理的により高精度にピントをはかることが出来きます。F2.8より明るい大口径レンズを使う場合には、さらに高精度なAF可能なのがF2.8対応センサーです。
これは、個人的な想像の部分も含まれるのですが、F8の光束を利用しようとすると、結像位置の動きは小さなものとなるため、十分なAF精度をだすためにはより小さな結像の動きも正確に捉える高性能なセンサーが必要となります。その高性能なセンサーで、通常はF8より検出しやすいF5.6の光束で検出できるため、F8対応センサーもまた高精度なセンサーであると言えます。
ミラーレスなどに使われる、像面位相差も基本的な考え方は、一眼レフの位相差検出式と同じなのですが、構造は全く異なります。
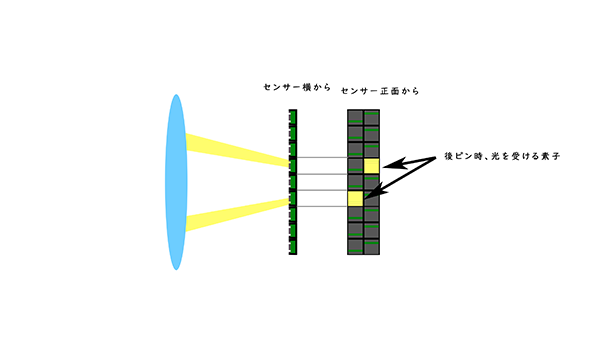
像面位相差の場合は、ごく一部にだけ穴の開いたマスクを画素に貼ることで、レンズの一部、この図だと上半分と下半分からの光だけを受ける画素を作ることで、ちょうど位相差センサーのような働きをする画素を作ってAF動作を実現しています。といっても、言葉だけで説明するのは難しいので、私が理解できた範囲で図にしてみました。
灰色の部分が、光を通さないマスクの部分になります。あと、うまく立体的に描けなかったので真横からみた図と正面からみた図を組み合わせています。横からの図だと上下二か所に穴が開いてるように見えますが、正面のように上だけ開いてる画素と下だけ開いている画素が別々にあります。(キヤノンのページをみると、上下ではなく左右ですが、これもうまく絵にできなかったので上下にしました。)
ピントが合っているときの像面位相差
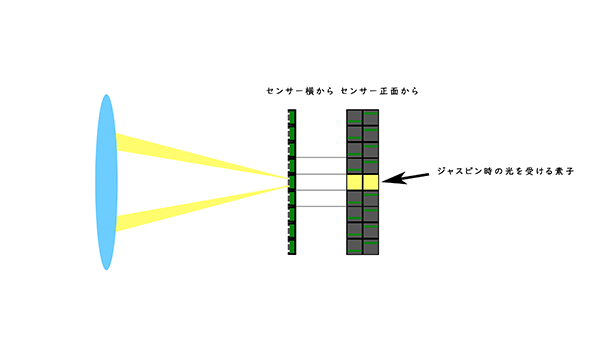
ピントが合っている場合は、ほぼ同じ位置にある画素に光が当たります。
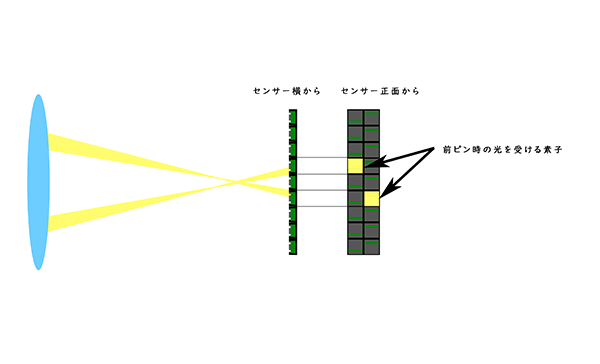
前ピンの場合の像面位相差
後ピンの場合の位相差
*2020年6月:前ピン・後ピンの図が逆になっていたのを修正しました。
前ピンと後ピンの場合、光を受ける画素の位置が異なるため、カメラは前ピンか後ピンかを判断できるようになり、何画素ずれているかで距離も認識できるようになります。
このような構造のため、マスクをしている場所は、普通の映像を記録する画素としては働かない
また、極端に大きくボケている場合、AFセンサー用の画素の範囲を超えてしまって、像面位相差でのAFができなくなるといったことが起こりえます。
なので、大きくボケていて、像面位相差でうまくAFが効かないといったときは、MFでちょっと像が見えるぐらいまで手助けしてあげると、すっとピントがあったりします。この辺りが一眼レフの位相差検出式との、使っていて感じやすい違いになります。
キヤノンのデュアルピクセル方式も、像面位相差と原理的には全く同じで、レンズの一部の光だけを受ける画素を作ることで、AFを実現しています。
が、大きく違うのは、それを実現している手段です、二つの小さな画素をまとめて一つの画素することで、マスクなしで可能にしています。
上の像面位相差では、「物理的に光を通さないマスク」によって、レンズの一部からの光を認識させました。そのためAF用の画素は、画像を作る画素としての働きを失っています。
一方、デュアルピクセル方式は、どの画素も、ここの図でいえば、レンズの上部と下部の光を別々に受け取ることができるため、ソフトウェア的にマスクをかけることが可能になるわけです、物理的に遮断をしていないため、AFをするときは一部だけの光を、撮影するときはすべての光を受け取ることができます。
像面位相差について、調べていて、あーだから、キヤノンはこういう構造の素子つくったのか、うまいこと考えたなぁと思わず手をたたきました。物理的なマスクがなくなれば、画像への影響とか考えなくてもいいわけですから、いくらでも位相差検出できるAFポイント作れるということになり、これはすごいメリットです
もちろん、そのために犠牲になる部分も少しはあります。処理が重くなるので画像処理エンジンにかかる負荷が大きくなる点、同面積のシングルピクセルに比べると、実際に光を受け取れる面積はどうしても小さくなる点の2点は弱点といえます。
デュアルピクセルのメリット・デメリット
メリット
- 全ての画素を画像を作る画素として利用できる
- 全ての画素をAF用の画素として利用できる
デメリット
- 画像素子から送られる情報が膨大になるため、高性能な画像処理エンジンが必須
- 受光面積が減る(高感度では、やや不利に働く)
ということになります。
メリットの方が圧倒的に大きいというのが、デュアルピクセル方式の個人的な印象です。
おすすめ記事